
近期,哈佛大学的研究人员研发了一款十二面体的“折纸花瓣”柔性机械臂RAD,能够抵达人类无法到达的深海,捕捉海底世界的软体动物并将其完好无损地带回陆地,对深海探索有极大应用潜力。相关论文发表在《科学·机器人技术》上。
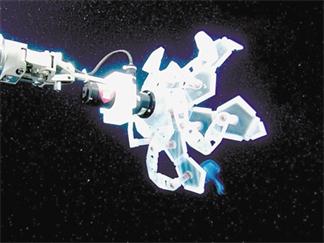
这是一款以折纸为灵感的机器人抓手,看上去像一朵五瓣花。当机器人抓手的5个花瓣关合时,从外形上看,这是一个中空的十二面体,能在观察到猎物时迅速关合,并给猎物留下足够空间。
这5个完全相同的花瓣是通过3D打印的聚合物,这种材料质地柔软耐用。花瓣们被连接到一系列的旋转接头上,旋转接头连在一起形成支架,仅需一个电机就能让整个结构围绕其关节旋转,将抓手折叠成中空的十二面体。
目前这款机器人抓手已在水族馆内进行测试,能成功捕获并释放柔软的水母,且不对它造成任何伤害。它还被安装在一款水下机器人机体上,成功潜入700米海底。
人工智能技术网 倡导尊重与保护知识产权。如发现本站文章存在版权等问题,烦请30天内提供版权疑问、身份证明、版权证明、联系方式等发邮件至1851688011@qq.com我们将及时沟通与处理。!:首页 > 机器人 » 哈佛“精灵球”直抵深海 把水母握在掌心