
本期课程讲解埃夫特机器人用户坐标系的操作。以工业6轴机器人为例,用户坐标系是由用户自定义原点及方向的空间直角坐标系统,其原点一般位于工件上,故也称为工件坐标系。主要作为程序中描述机器人TCP所在的空间位置以及工具姿态的参考坐标系。

使用用户坐标系的好处
1. 按照现场工况,自定义用户坐标系的方向,方便平行于工件方向移动机器人,提高操作效率。

2. 由于程序中的直角点位坐标都是以用户坐标系为参考的,通过切换程序中的用户坐标系,实现点位的整体偏移。

用户坐标系的演示
接下来将演示如何使用一个已经定义好原点以及方向的用户坐标系,并在该用户坐标系下操作机器人移动。
请注意:
在使用用户坐标系操作时,机器人此时的姿态也不能处于奇异点位置,否则机器人会报警,如果处于奇异点位置需要切换成关节坐标系去移动机器人直至其不处于奇异点位置。解决办法详见《机器人坐标系运动》课程。
另外,使用用户坐标系移动机器人时机器人当前的参考点为当前激活的TCP。
步骤一:将模式旋钮旋转到T1档位,切换成手动模式。
步骤二:点击状态栏此处,将操作模式选择为“用户”。
步骤三:点击状态栏此处,选择指定的用户坐标系号。系统共有5个用户坐标系号wobj1-5,可以被用户自定义,wobj0是系统默认用户坐标系,即机器人坐标系。这里我们选择“wobj3”。

wobj3的方向和原点如图所示
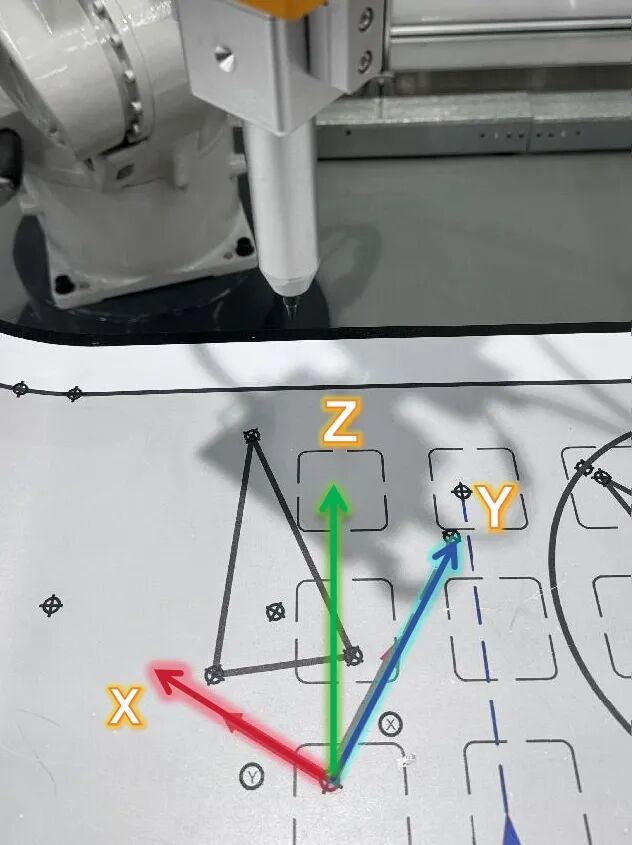
Wobj3用户坐标系操作演示
步骤四:左手伺服使能并保持,右手选择对应方向的轴动作按钮,按下并保持即可操作机器人往用户坐标系对应方向的正或负进行运动,松开即停止。

用户坐标系下的运动操作演示如下:
按下1+,向用户坐标wobj3的X正方向移动;按下1-,向用户坐标wobj3的X负方向移动。
按下2+,向用户坐标wobj3的Y正方向移动;按下2-,向用户坐标wobj3的Y负方向移动。
按下3+,向用户坐标wobj3的Z正方向移动;按下3-,向用户坐标wobj3的Z负方向移动。
按下4+,向用户坐标wobj3的A正方向旋转;按下4-,向用户坐标wobj3的A负方向旋转。
按下5+,向用户坐标wobj3的B正方向旋转;按下5-,向用户坐标wobj3的B负方向旋转。
按下6+,向用户坐标wobj3的C正方向旋转;按下6-,向用户坐标wobj3的C负方向旋转。
以上按键控制的是工具在空间当中的姿态,注意,这里的ABC,其分别围绕旋转的轴心是当前选择的用户坐标系wobj3的ZYX。
如果需要知道当前TCP在用户坐标系下的位置数据,在任务栏找到“监控”并点击选择“位置”,然后在此处选择“用户坐标系”选项即可。
人工智能技术网 倡导尊重与保护知识产权。如发现本站文章存在版权等问题,烦请30天内提供版权疑问、身份证明、版权证明、联系方式等发邮件至1851688011@qq.com我们将及时沟通与处理。!:首页 > 机器人 » EFORT机器人学院 ——用户坐标系下操作机器人